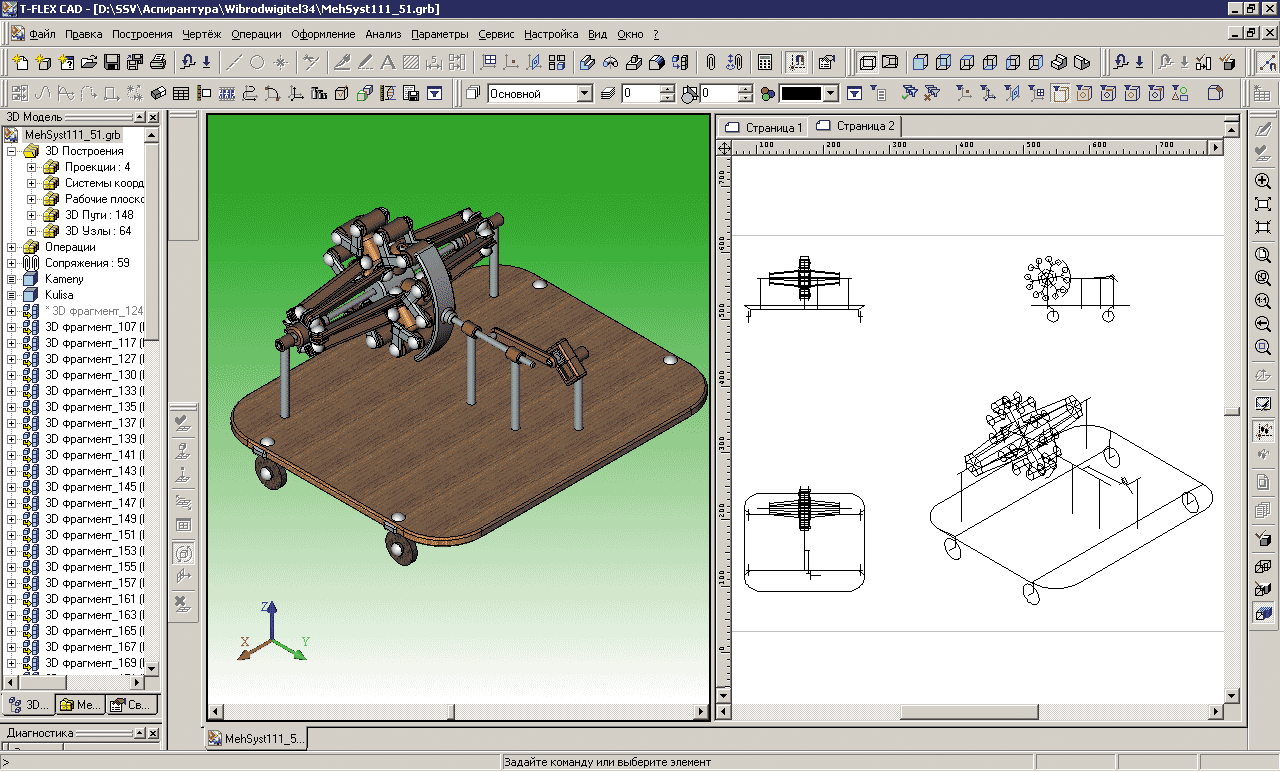
Построение модели механизма по кинематической схеме
 | Контент-платформа visitdublin.ru")
Энциклопедия по машиностроению XXL
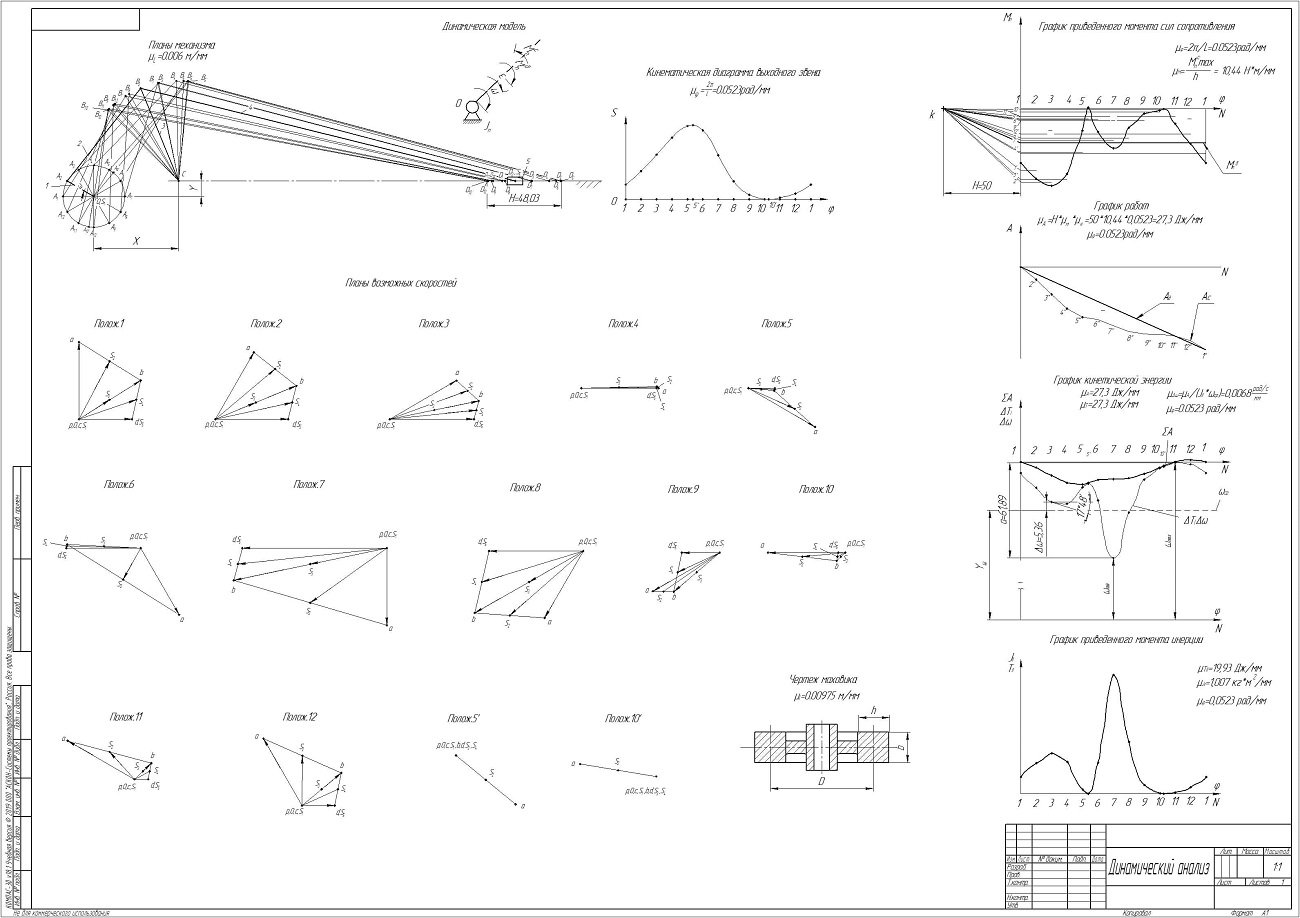
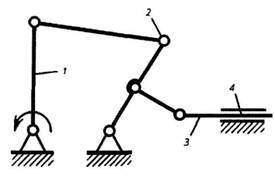
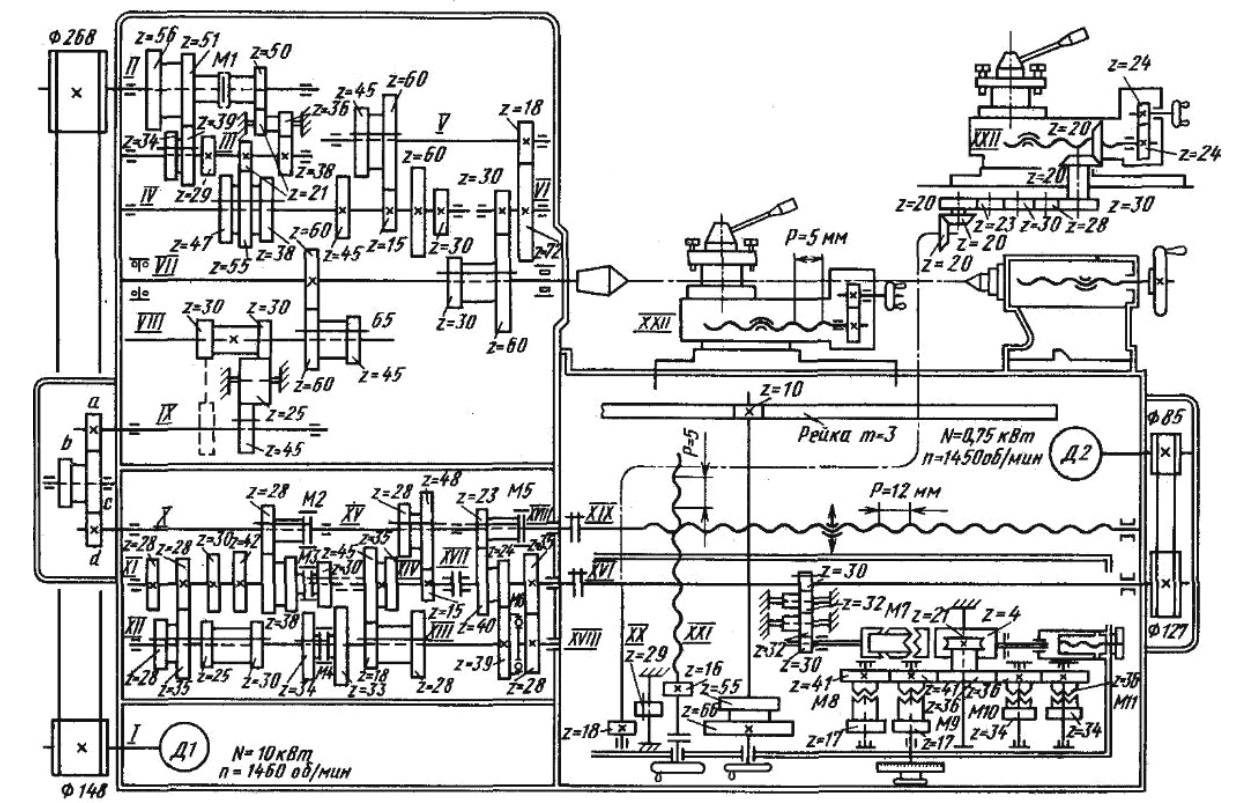
Выполняем построение кинематической схемы механизма в принятом масштабе длин по заданным размерам звеньев и параметров механизма. Разбиваем траекторию движения кривошипа OA на 12 частей. В качестве нулевого положения механизма от которого начинается отсчет движения принимаем одно из крайних положений. С этого положения начинается рабочий ход механизма. Одно из положений звеньев механизма, положение, для которого выполняется силовой расчет, обводится более яркими линиями. Кинематическая схема для привода механизма поперечной подачи токарного станка 16А20Ф3 представлена на рисунке 3.









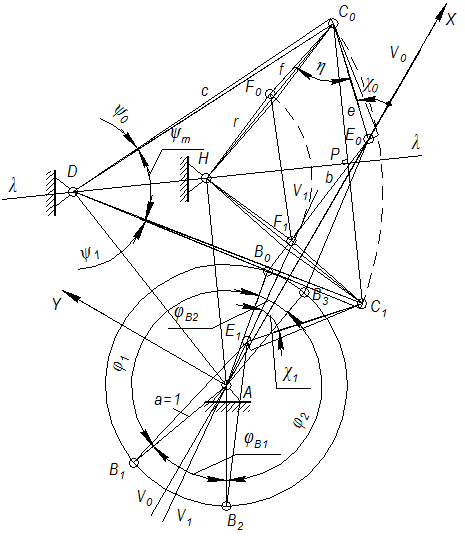
Заморуев, И. Калапышина Рассматривается кинематическая схема двухпараметрической сканирующей антенны и характер ее движения. Предложена имитационная модель механического модуля антенного устройства в пакете SimMechanics и получено решение аналитических уравнений движения механического модуля с помощью функций пакета программ MATLAB. Проведено сравнение численных результатов, полученных при одинаковых начальных условиях с использованием имитационной модели механического модуля в пакете SimMechanics и аналитических уравнений движения в пакете программ MATLAB. Смоделирован случай с дополнительным углом поворота. Ключевые слова: моделирование, сканирующая антенна, кинематика, система рычагов.






Закабунин В. Структура механизмов , Теория механизмов и машин , Основы конструирования , Прикладная механика. Ознакомиться с текстом. В избранное В избранном. Вид издания.